My book
My book, Designing Data-Intensive Applications, has received thousands of five-star reviews.
Published by Martin Kleppmann on 11 May 2015.
This blog post has been translated into Russian, Japanese, Chinese, and Chinese again. For more detail on problems with CAP, and a proposal for an alternative, please see my paper A Critique of the CAP Theorem.
In his excellent blog post Notes on Distributed Systems for Young Bloods, Jeff Hodges recommends that you use the CAP theorem to critique systems. A lot of people have taken that advice to heart, describing their systems as “CP” (consistent but not available under network partitions), “AP” (available but not consistent under network partitions), or sometimes “CA” (meaning “I still haven’t read Coda’s post from almost 5 years ago”).
I agree with all of Jeff’s other points, but with regard to the CAP theorem, I must disagree. The CAP theorem is too simplistic and too widely misunderstood to be of much use for characterizing systems. Therefore I ask that we retire all references to the CAP theorem, stop talking about the CAP theorem, and put the poor thing to rest. Instead, we should use more precise terminology to reason about our trade-offs.
(Yes, I realize the irony of writing a blog post about the very topic that I am asking people to stop writing about. But at least it gives me a URL that I can give to people when they ask why I don’t like them talking about the CAP theorem. Also, apologies if this is a bit of a rant, but at least it’s a rant with lots of literature references.)
If you want to refer to CAP as a theorem (as opposed to a vague hand-wavy concept in your database’s marketing materials), you have to be precise. Mathematics requires precision. The proof only holds if you use the words with the same meaning as they are used in the proof. And the proof uses very particular definitions:
Consistency in CAP actually means linearizability, which is a very specific (and very strong) notion of consistency. In particular it has got nothing to do with the C in ACID, even though that C also stands for “consistency”. I explain the meaning of linearizability below.
Availability in CAP is defined as “every request received by a non-failing [database] node in the system must result in a [non-error] response”. It’s not sufficient for some node to be able to handle the request: any non-failing node needs to be able to handle it. Many so-called “highly available” (i.e. low downtime) systems actually do not meet this definition of availability.
Partition Tolerance (terribly mis-named) basically means that you’re communicating over an asynchronous network that may delay or drop messages. The internet and all our datacenters have this property, so you don’t really have any choice in this matter.
Also note that the CAP theorem doesn’t just describe any old system, but a very specific model of a system:
The CAP system model is a single, read-write register – that’s all. For example, the CAP theorem says nothing about transactions that touch multiple objects: they are simply out of scope of the theorem, unless you can somehow reduce them down to a single register.
The only fault considered by the CAP theorem is a network partition (i.e. nodes remain up, but the network between some of them is not working). That kind of fault absolutely does happen, but it’s not the only kind of thing that can go wrong: nodes can crash or be rebooted, you can run out of disk space, you can hit a bug in the software, etc. In building distributed systems, you need to consider a much wider range of trade-offs, and focussing too much on the CAP theorem leads to ignoring other important issues.
Also, the CAP theorem says nothing about latency, which people tend to care about more than availability. In fact, CAP-available systems are allowed to be arbitrarily slow to respond, and can still be called “available”. Going out on a limb, I’d guess that your users wouldn’t call your system “available” if it takes 2 minutes to load a page.
If your use of words matches the precise definitions of the proof, then the CAP theorem applies to you. But if you’re using some other notion of consistency or availability, you can’t expect the CAP theorem to still apply. Of course, that doesn’t mean you can suddenly do impossible things, just by redefining some words! It just means that you can’t turn to the CAP theorem for guidance, and you cannot use the CAP theorem to justify your point of view.
If the CAP theorem doesn’t apply, that means you have to think through the trade-offs yourself. You can reason about consistency and availability using your own definitions of those words, and you’re welcome to prove your own theorem. But please don’t call it CAP theorem, because that name is already taken.
In case you’re not familiar with linearizability (i.e. “consistency” in the CAP sense), let me explain it briefly. The formal definition is not entirely straightforward, but the key idea, stated informally, is this:
If operation B started after operation A successfully completed, then operation B must see the the system in the same state as it was on completion of operation A, or a newer state.
To make this more tangible, consider an example of a system that is not linearizable. See the following diagram (sneak preview from an unreleased chapter of my book):
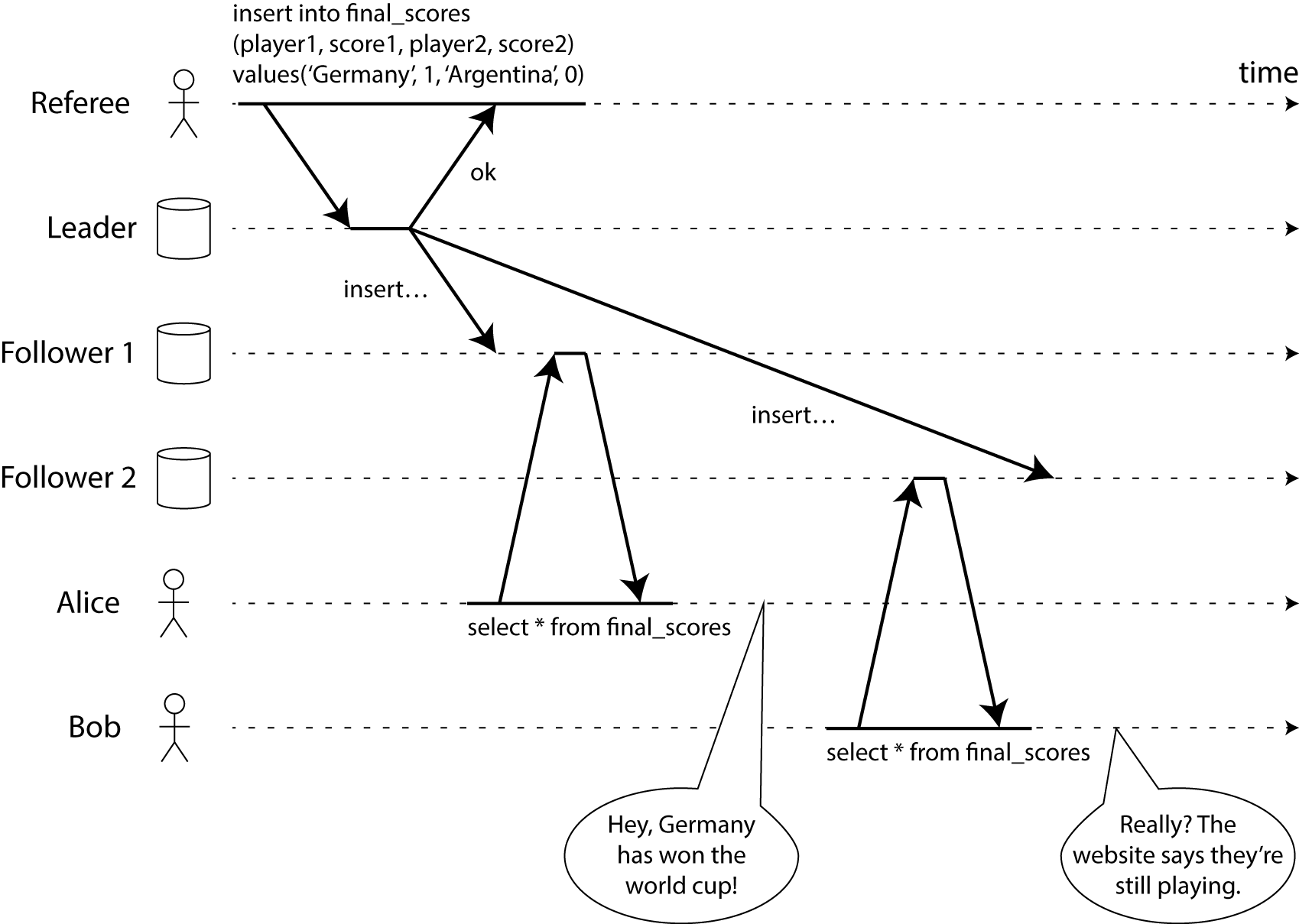
This diagram shows Alice and Bob, who are in the same room, both checking their phones to see the outcome of the 2014 football world cup final. Just after the final score is announced, Alice refreshes the page, sees the winner announced, and excitedly tells Bob about it. Bob incredulously hits reload on his own phone, but his request goes to a database replica that is lagging, and so his phone shows that the game is still ongoing.
If Alice and Bob had hit reload at the same time, it wouldn’t have been surprising if they had got two different query results, because they don’t know at exactly what time their respective requests were processed by the server. However, Bob knows that he hit the reload button (initiated his query) after he heard Alice exclaim the final score, and therefore he expects his query result to be at least as recent as Alice’s. The fact that he got a stale query result is a violation of linearizability.
Knowing that Bob’s request happened strictly after Alice’s request (i.e. that they were not concurrent) depends on the fact that Bob heard about Alice’s query result through a separate communication channel (in this case, IRL audio). If Bob hadn’t heard from Alice that the game was over, he wouldn’t have known that the result of his query was stale.
If you’re building a database, you don’t know what kinds of backchannel your clients may have. Thus, if you want to provide linearizable semantics (CAP-consistency) in your database, you need to make it appear as though there is only a single copy of the data, even though there may be copies (replicas, caches) of the data in multiple places.
This is a fairly expensive guarantee to provide, because it requires a lot of coordination. Even the CPU in your computer doesn’t provide linearizable access to your local RAM! On modern CPUs, you need to use an explicit memory barrier instruction in order to get linearizability. And even testing whether a system provides linearizability is tricky.
Let’s talk briefly about the need to give up either linearizability or availability in the case of a network partition.
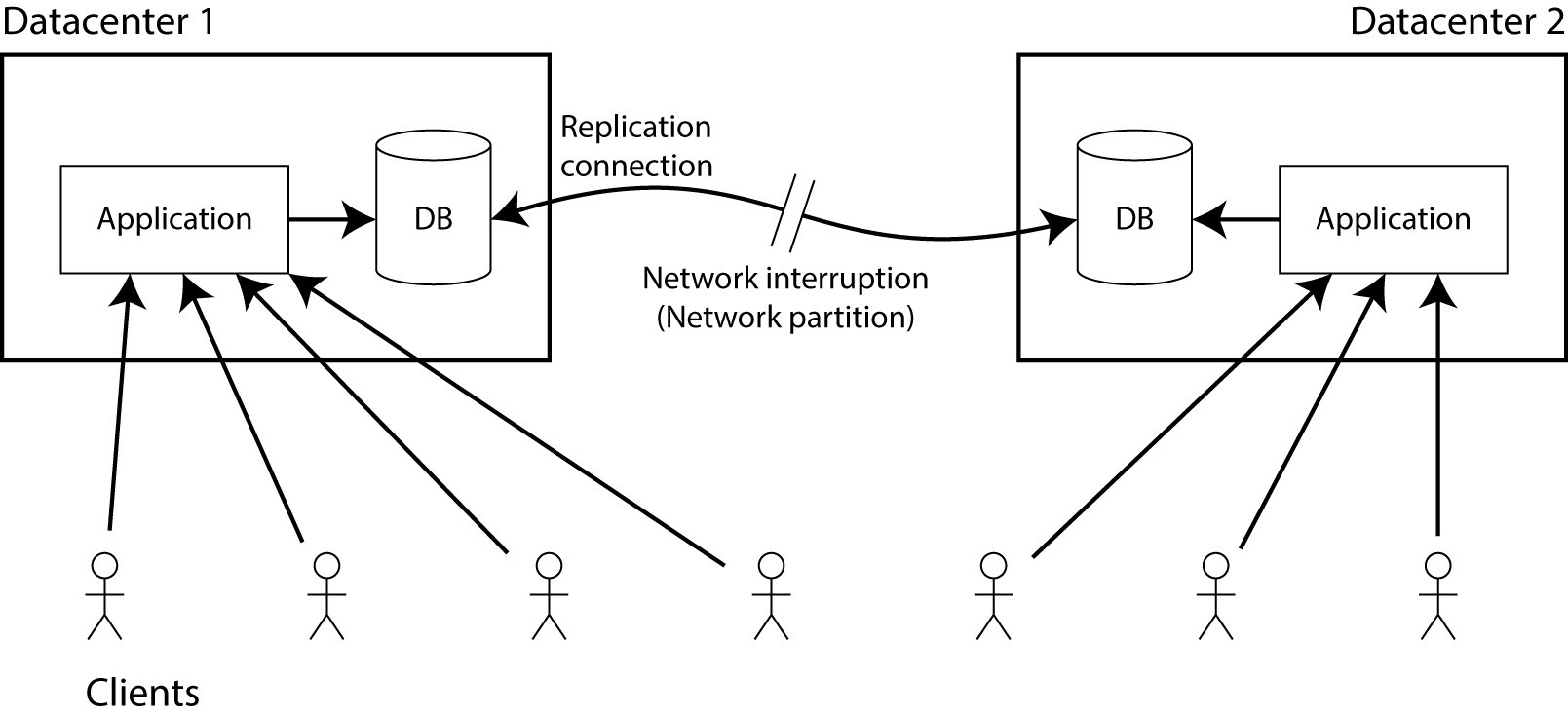
Let’s say you have replicas of your database in two different datacenters. The exact method of replication doesn’t matter for now – it may be single-leader (master/slave), multi-leader (master/master) or quorum-based replication (Dynamo-style). The requirement of replication is that whenever data is written in one datacenter, it also has to be written to the replica in the other datacenter. Assuming that clients only connect to one datacenter, there must be a network link between the two datacenters over which the replication happens.
Now assume that network link is interrupted – that’s what we mean with a network partition. What happens?
Clearly you can choose one of two things:
The application continues to be allowed to write to the database, so it remains fully available in both datacenters. However, as long as the replication link is interrupted, any changes that are written in one datacenter will not appear in the other datacenter. This violates linearizability (in terms of the previous example, Alice could be connected to DC 1 and Bob could be connected to DC 2).
If you don’t want to lose linearizability, you have to make sure you do all your reads and writes in one datacenter, which you may call the leader. In the other datacenter (which cannot be up-to-date, due to the failed replication link), the database must stop accepting reads and writes until the network partition is healed and the database is in sync again. Thus, although the non-leader database has not failed, it cannot process requests, so it is not CAP-available.
(And this, by the way, is essentially the proof of the CAP theorem. That’s all there is to it. This example uses two datacenters, but it applies equally to network problems within a single datacenter. I just find it easier to think about when I imagine it as two datacenters.)
Note that in our notionally “unavailable” situation in option 2, we’re still happily processing requests in one of the datacenters. So if a system chooses linearizability (i.e. it is not CAP-available), that doesn’t necessarily mean that a network partition automatically leads to an outage of the application. If you can shift all clients to using the leader datacenter, the clients will in fact see no downtime at all.
Availability in practice does not quite correspond to CAP-availability. Your application’s availability is probably measured with some SLA (e.g. 99.9% of well-formed requests must return a successful response within 1 second), but such an SLA can be met both with CAP-available and CAP-unavailable systems.
In practice, multi-datacenter systems are often designed with asynchronous replication, and thus non-linearizable. However, the reason for that choice is often the latency of wide-area networks, not just wanting to tolerate datacenter and network failures.
Under the CAP theorem’s strict definitions of consistency (linearizability) and availability, how do systems fare?
For example, take any replicated database with a single leader, which is the standard way of setting up replication in most relational databases. In this configuration, if a client is partitioned from the leader, it cannot write to the database. Even though it may be able to read from a follower (a read-only replica), the fact that it cannot write means any single-leader setup is not CAP-available. Never mind that such configurations are often marketed as “high availability”.
If single-leader replication is not CAP-available, does that make it “CP”? Wait, not so fast. If you allow the application to make reads from a follower, and the replication is asynchronous (the default in most databases), then a follower may be a little behind the leader when you read from it. In this case, your reads will not be linearizable, i.e. not CAP-consistent.
Moreover, databases with snapshot isolation/MVCC are intentionally non-linearizable, because enforcing linearizability would reduce the level of concurrency that the database can offer. For example, PostgreSQL’s SSI provides serializability but not linearizability, and Oracle provides neither. Just because a database is branded “ACID” doesn’t mean it meets the CAP theorem’s definition of consistency.
So these systems are neither CAP-consistent nor CAP-available. They are neither “CP” nor “AP”, they are just “P”, whatever that means. (Yes, the “two out of three” formulation does allow you to pick only one out of three, or even none out of three!)
What about “NoSQL”? Take MongoDB, for example: it has a single leader per shard (or at least it’s supposed to, if it’s not in split-brain mode), so it’s not CAP-available by the argument above. And Kyle recently showed that it allows non-linearizable reads even at the highest consistency setting, so it’s not CAP-consistent either.
And the Dynamo derivatives like Riak, Cassandra and Voldemort, which are often called “AP” since they optimize for high availability? It depends on your settings. If you accept a single replica for reads and writes (R=W=1), they are indeed CAP-available. However, if you require quorum reads and writes (R+W>N), and you have a network partition, clients on the minority side of the partition cannot reach a quorum, so quorum operations are not CAP-available (at least temporarily, until the database sets up additional replicas on the minority side).
You sometimes see people claiming that quorum reads and writes guarantee linearizability, but I think it would be unwise to rely on it – subtle combinations of features such as sloppy quorums and read repair can lead to tricky edge cases in which deleted data is resurrected, or the number of replicas of a value falls below the original W (violating the quorum condition), or the number of replica nodes increases above the original N (again violating the quorum condition). All of these lead to non-linearizable outcomes.
These are not bad systems: people successfully use them in production all the time. However, so far we haven’t been able to rigorously classify them as “AP” or “CP”, either because it depends on the particular operation or configuration, or because the system meets neither of the CAP theorem’s strict definitions of consistency or availability.
What about ZooKeeper? It uses a consensus algorithm, so people generally regard it as a clear-cut case of choosing consistency over availability (i.e. a “CP system”).
However, if you look at the ZooKeeper docs, they make quite clear that ZooKeeper by default does not provide linearizable reads. Each client is connected to one of the server nodes, and when you make a read, you see only the data on that node, even if there are more up-to-date writes on another node. This makes reads much faster than if you had to assemble a quorum or contact the leader for every read, but it also means that ZooKeeper by default does not meet the CAP theorem’s definition of consistency.
It is possible to make linearizable reads in ZooKeeper by preceding a read with a sync
command. That isn’t the default though, because it comes with a performance penalty.
People do use sync, but usually not all the time.
What about ZooKeeper availability? Well, ZK requires a majority quorum in order to reach consensus, i.e. in order to process writes. If you have a partition with a majority of the nodes on one side and a minority on the other, then the majority side continues to function, but the nodes on the minority side can’t process writes, even though the nodes are up. Thus, writes in ZK are not CAP-available under a partition (even though the majority side can continue to process writes).
To add to the fun, ZooKeeper 3.4.0 added a read-only mode, in which nodes on the
minority side of a partition can continue serving read requests – no quorum needed! This read-only
mode is CAP-available. Thus, ZooKeeper by default is neither CAP-consistent (CP) nor CAP-available
(AP) – it’s really just “P”. However, you can optionally make it CP by calling sync if you want,
and for reads (but not for writes) it’s actually AP, if you turn on the right option.
But this is irritating. Calling ZooKeeper “not consistent”, just because it’s not linearizable by default, really badly misrepresents its features. It actually provides an excellent level of consistency! It provides atomic broadcast (which is reducible to consensus) combined with the session guarantee of causal consistency – which is stronger than read your writes, monotonic reads and consistent prefix reads combined. The documentation says that it provides sequential consistency, but it’s under-selling itself, because ZooKeeper’s guarantees are in fact much stronger than sequential consistency.
As ZooKeeper demonstrates, it is quite reasonable to have a system that is neither CAP-consistent nor CAP-available in the presence of partitions, and by default isn’t even linearizable in the absence of partitions. (I guess that would be PC/EL in Abadi’s PACELC framework, but I don’t find that any more enlightening than CAP.)
The fact that we haven’t been able to classify even one datastore as unambiguously “AP” or “CP” should be telling us something: those are simply not the right labels to describe systems.
I believe that we should stop putting datastores into the “AP” or “CP” buckets, because:
Within one piece of software, you may well have various operations with different consistency characteristics.
Many systems are neither consistent nor available under the CAP theorem’s definitions. However, I’ve never heard anyone call their system just “P”, presumably because it looks bad. But it’s not bad – it may be a perfectly reasonable design, it just doesn’t fit one of the two CP/AP buckets.
Even though most software doesn’t neatly fit one of those two buckets, people try to shoehorn software into one of the two buckets anyway, thereby inevitably changing the meaning of “consistency” or “availability” to whatever definition suits them. Unfortunately, if the meaning of the words is changed, the CAP theorem no longer applies, and thus the CP/AP distinction is rendered completely meaningless.
A huge amount of subtlety is lost by putting a system in one of two buckets. There are many considerations of fault-tolerance, latency, simplicity of programming model, operability, etc. that feed into the design of a distributed systems. It is simply not possible to encode this subtlety in one bit of information. For example, even though ZooKeeper has an “AP” read-only mode, this mode still provides a total ordering of historical writes, which is a vastly stronger guarantee than the “AP” in a system like Riak or Cassandra – so it’s ridiculous to throw them into the same bucket.
Even Eric Brewer admits that CAP is misleading and oversimplified. In 2000, it was meant to start a discussion about trade-offs in distributed data systems, and it did that very well. It wasn’t intended to be a breakthrough formal result, nor was it meant to be a rigorous classification scheme for data systems. 15 years later, we now have a much greater range of tools with different consistency and fault-tolerance models to choose from. CAP has served its purpose, and now it’s time to move on.
If CP and AP are unsuitable to describe and critique systems, what should you use instead? I don’t think there is one right answer. Many people have thought hard about these problems, and proposed terminology and models to help us understand problems. To learn about those ideas, you’ll have to go deeper into the literature.
A good starting point is Doug Terry’s paper in which he explains various different levels of eventual consistency using Baseball examples. It’s very readable and clear, even if (like me) you’re not American and have no clue about Baseball.
If you’re interested in transaction isolation models (which is not the same as consistency of distributed replicas, but somewhat related), my little project Hermitage may be relevant.
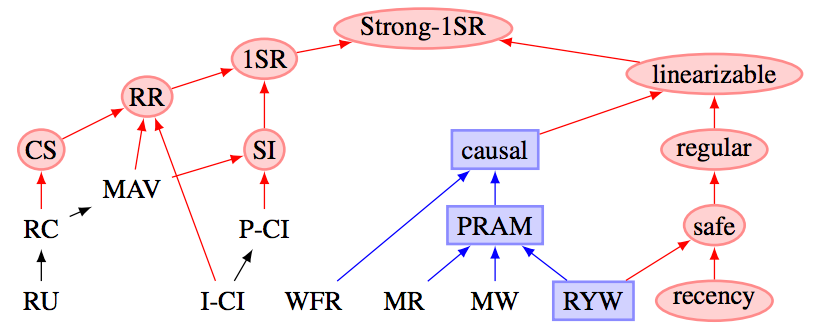 The connections between
replica consistency, transaction isolation and availability are explored by Peter Bailis et
al. (That paper also explains the meaning of that hierarchy of consistency levels which
Kyle Kingsbury likes to show.)
The connections between
replica consistency, transaction isolation and availability are explored by Peter Bailis et
al. (That paper also explains the meaning of that hierarchy of consistency levels which
Kyle Kingsbury likes to show.)
When you’ve read those, you should be ready to dive deeper into the literature. I’ve scattered a ton of links to papers throughout this post. Do take a look at them: a number of experts have already figured out a lot of stuff for you.
As a last resort, if you can’t face reading the original papers, I suggest you take a look at my book, which summarizes the most important ideas in an approachable manner. (See, I tried very hard not to make this post a sales pitch.)
If you want to know more specifically about using ZooKeeper correctly, Flavio Junqueira and Benjamin Reed’s book is good.
Whatever way you choose to learn, I encourage you to be curious and patient – this stuff doesn’t come easy. But it’s rewarding, because you learn to reason about trade-offs, and thus figure out what kind of architecture works best for your particular application. But whatever you do, please stop talking about CP and AP, because they just don’t make any sense.
Thank you to Kyle Kingsbury and Camille Fournier for comments on a draft of this post. Any errors or unpalatable opinions are mine, of course.
If you found this post useful, please support me on Patreon so that I can write more like it!
To get notified when I write something new, follow me on Bluesky or Mastodon, or enter your email address:
I won't give your address to anyone else, won't send you any spam, and you can unsubscribe at any time.
My book, Designing Data-Intensive Applications, has received thousands of five-star reviews.
![]() Unless otherwise specified, all content on this site is licensed under a
Creative Commons
Attribution 3.0 Unported License.
Theme borrowed from
Carrington,
ported to Jekyll by Martin Kleppmann.
Unless otherwise specified, all content on this site is licensed under a
Creative Commons
Attribution 3.0 Unported License.
Theme borrowed from
Carrington,
ported to Jekyll by Martin Kleppmann.